We had located our first engine. The engine was heavily damaged with no identifying features visible. We decided to move on to the next debris field in hopes of finding an intact engine with a serial number which would confirm the mission origin.
We had located our first engine. The engine was heavily damaged with no identifying features visible. We decided to move on to the next debris field in hopes of finding an intact engine with a serial number which would confirm the mission origin.
The sonar specialist provided the corrected target position to the navigator who plugged coordinates into the navigation software. The ROV pilot turned and slowly applied forward thrust on a heading that would take him to the next debris field. Three miles above the ship very slowly, the navigator followed the same track in a coordinated maneuver. The ROV could only range a short distance from directly below the support vessel, so both needed to move in concert and thus the coordinated, simultaneous effort.

After a slow trek across the bottom, small bits of debris appeared, indicating we were closing in on the next debris field. At each artifact, we stopped, captured high-resolution imagery and marked the position. The sonar indicated several large contacts ahead. Like a bloodhound locked onto a scent, the ROV followed the sonar to the target. This time a turbo pump, next a heat exchanger, and finally another engine.
The good news was this engine was more intact with the liquid oxygen dome still attached. The bad news was the heavy end of the engine had impaled itself into the sea floor. After impacting the water, the engine had accelerated, falling through two and half miles of water to impact the bottom with enough force so as to create an impact crater. Cautiously, the ROV circled the engine looking for a serial number or identification plate that would confirm the engine was from Apollo 11.

So intent was our focus on the screen, we had failed to notice the growing sea state. Word came down from the bridge that the weather was deteriorating, leaving only enough time for a quick recovery and ascent to the surface before conditions would endanger the recovery of artifacts and robots. This engine was in better shape but as it was impaled in the bottom, it would have required hours of excavation prior to the lift.
The decision was made to recover the first thrust chamber lying on top of the sediment. The ship and ROV moved back to the first location and once over the remains of the engine, the second ROV and recovery basket hit the water.
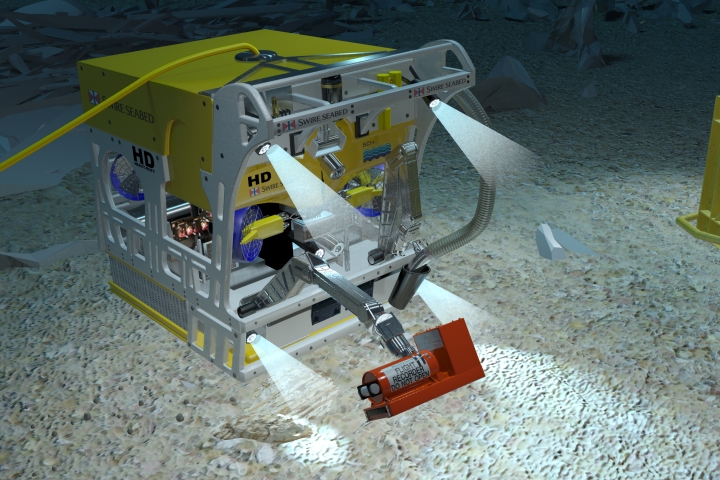
The recovery basket was lowered on the lifting winch with HD28, the second ROV, following to ensure a safe decent. On the bottom, HD28 removed a lifting sling from the skuff (Norwegian for drawer). HD28 had a small hydraulically-operated compartment under the manipulator arms which opened and closed like a drawer. Inside were tools and lifting slings which could be used by the ROV during its recovery mission.

The sling was easily threaded through the open thrust chamber and cinched tight. These pilots were maestros at maneuvering the manipulator arms. HD23 retrieved the lift line from the recovery basket and brought the hook on the end of the line over to HD28. Using the manipulators, known and manips to the pilots, the sling was carefully hooked into the free loop. Slowly the winch raised the thrust chamber and guided by the ROV, maneuvered the artifact over the recovery basket. Ever so very slowly, the thrust chamber was lowered into the basket. After a collective sigh of relief, the lifting line was disconnected from the engine sling and reattached to the basket.
Both ROVs and the basket slowly retraced their decent back to the surface. The ROVs were recovered and the basket was transferred from the deep winch to the deck crane. Once secured, the crane operator had to swing the basket around the stern and lift the basket onto the deck. A very simple maneuver in calm seas. By now, the ship was pitching and rolling and the crane operator had the basket in the water beside the ship, waiting for a lull in the sea state. The aft deck had been cleared of personnel since the heavy basket coming onboard could easily crush a man.
The next series of waves appeared smaller and the  whine of the crane winch increased as the operator lifted the basket from the sea. Water poured from the basket. An unexpected wave started the basket swinging and the experienced crane jockey immediately slacked the wire, dropping the basket back into the sea to stop the dangerous swinging. Undeterred, he patiently waited for another smaller wave set. Timing the lift, he yanked the recovery basket up and out of the water. The basket swung inboard and kissed the deck, sliding to a stop just as the ship stopped a port roll. The recovery team cheered as two deckhands ran to the basket and secured it with chains before the load could shift.
whine of the crane winch increased as the operator lifted the basket from the sea. Water poured from the basket. An unexpected wave started the basket swinging and the experienced crane jockey immediately slacked the wire, dropping the basket back into the sea to stop the dangerous swinging. Undeterred, he patiently waited for another smaller wave set. Timing the lift, he yanked the recovery basket up and out of the water. The basket swung inboard and kissed the deck, sliding to a stop just as the ship stopped a port roll. The recovery team cheered as two deckhands ran to the basket and secured it with chains before the load could shift.
Once the basket had been secured, everyone swarmed to the engine. The archaeologist and recovery team started examining the engine looking for clues to its origin. The seas were building, and unknown to the team then, we would have to wait many days before the weather allowed us back on site.

During the storm, we had discovered a serial number on the engine which was not from Apollo 11. Once the storm had abated, we would return to the second engine to excavate and recover it. Everyone grew restless as the storm droned on for five days agonizingly long days before we could move back into position. It was an additional day before the sea state had calmed enough for the ROVs to work on the bottom, and finally, we were back on task.
With the ROVs back on the bottom, HD28 started excavating the impaled engine. Using the manipulator, the pilot removed the dredge from its holster on the port side of the vehicle and slowly sucked sediment away from the base of the engine. The deep ocean current helped. As the dredge material spewed out the stern exhaust, the prevailing current carried the sediment away, keeping visibility reasonable. Deepwater dredging is a  slow process. The excavation took several hours to expose 3/4 of the engine. Before rigging the engine for lifting, HD23 examined it with the high-resolution camera, searching for serial numbers or certification plates which would confirm its origin.
slow process. The excavation took several hours to expose 3/4 of the engine. Before rigging the engine for lifting, HD23 examined it with the high-resolution camera, searching for serial numbers or certification plates which would confirm its origin.
We worked two 10-meter lifting slings over the engine to create a lifting bridal. The heavy winch hook was threaded through the two lifting loops and the winch slowly increased the tension. Eyes were fixed on the lifting tension display. Four tons. Five tons. Six tons. Slowly the tension rose as the winch attempted to pull the engine from the remaining sediment in the hole. Finally, the engine popped loose in a cloud of sediment and to the cheers in the control room. The ROVs transferred the engine to the recovery basket and yet another engine was on its way to the surface.
 Over three weeks, we examined numerous debris fields and recovered several engines and numerous artifacts. Each item was meticulously documented and cataloged upon recovery to the deck. Each engine was closely examined for identifying features, and while we strongly suspected we had recovered an engine from Apollo 11, there was still some doubt as we combed through the hundreds of documents trying to match engine part serial numbers with various Apollo flights. The final confirmation would require meticulous cleaning to expose identifying numbers which only could be performed in a laboratory.
Over three weeks, we examined numerous debris fields and recovered several engines and numerous artifacts. Each item was meticulously documented and cataloged upon recovery to the deck. Each engine was closely examined for identifying features, and while we strongly suspected we had recovered an engine from Apollo 11, there was still some doubt as we combed through the hundreds of documents trying to match engine part serial numbers with various Apollo flights. The final confirmation would require meticulous cleaning to expose identifying numbers which only could be performed in a laboratory.
In our next post, we will relive the return of the engines to Cape Canaveral and their transfer to the newly-built laboratory at the Cosmosphere.
© Copyright 2014 Vincent Capone
With Permission from Bezos Expeditions
Missed earlier posts in this series?
The story begins here: How Do you Recover An Apollo Rocket Engine from 3 Miles Beneath the Bermuda Triangle?
The search gets underway here: Finding An Apollo Rocket Engine in the Deep Ocean
The best recovery ship for the job is found here: The Right Stuff for a Deepwater Recovery
Marvel at the recovery technology in action here: Operations of the F-1 Engine Recovery