and Vince Capone exmine GPR Data")
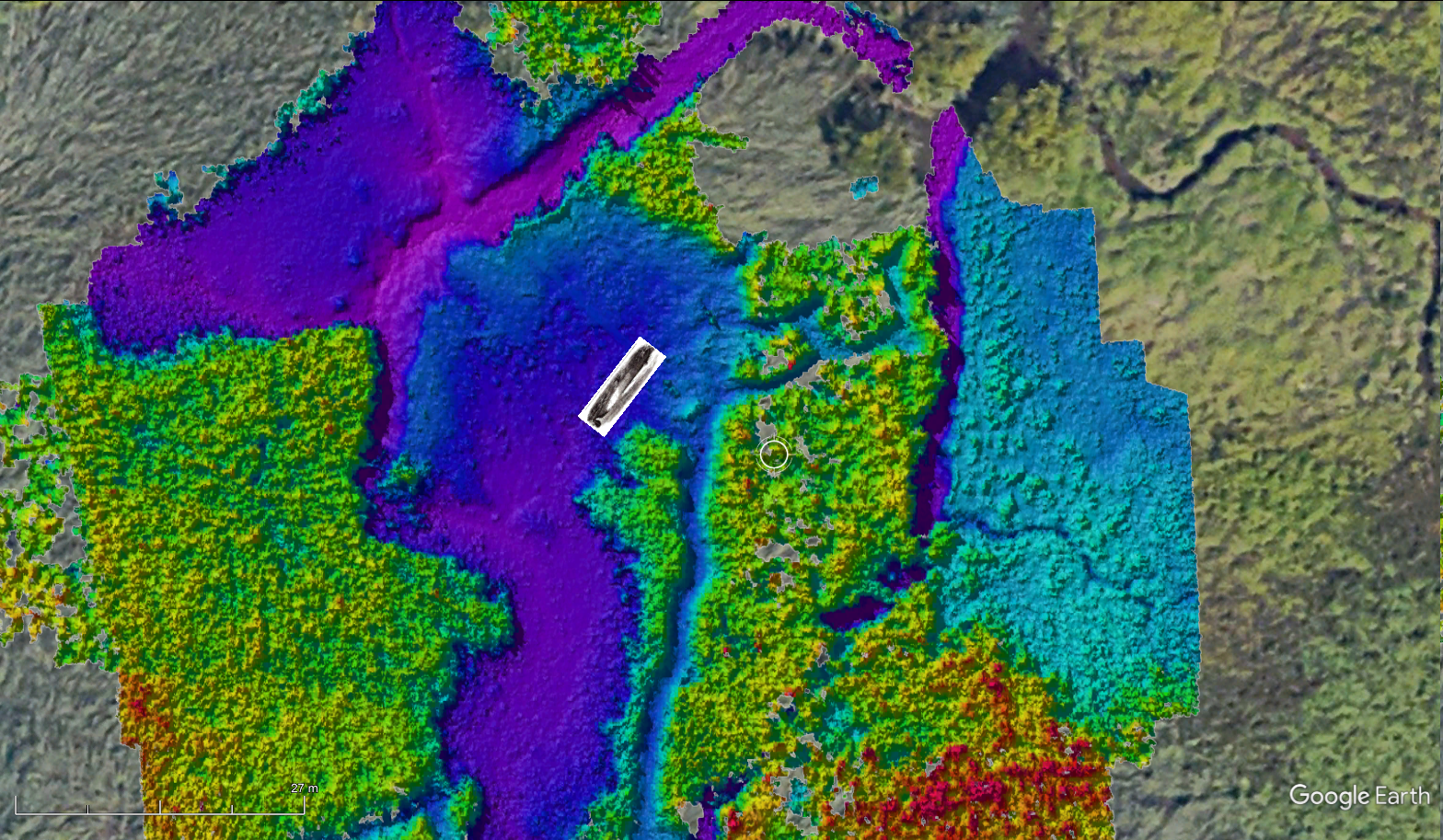
 On Saturday, February 22, a team from The Explorers Club, supported by a local team of history enthusiasts, chased Alice Smith’s dream of finding the prototype (Alligator Jr) of America’s first submarine, the Alligator. Carrying EC Flag 71, the team descended into the frozen marsh to identify a sizeable magnetic anomaly with ground-penetrating radar (GPR) generously provided by Art Trembanis (Philadelphia EC Chapter FN-21) and his team from the University of Delaware College of Earth, Ocean, and Environment.
On Saturday, February 22, a team from The Explorers Club, supported by a local team of history enthusiasts, chased Alice Smith’s dream of finding the prototype (Alligator Jr) of America’s first submarine, the Alligator. Carrying EC Flag 71, the team descended into the frozen marsh to identify a sizeable magnetic anomaly with ground-penetrating radar (GPR) generously provided by Art Trembanis (Philadelphia EC Chapter FN-21) and his team from the University of Delaware College of Earth, Ocean, and Environment.
 This effort builds on 20 years of effort, as I conducted my first search with Alice in 2005. Over the years, the search has been supported by Steve Nagiewicz (Philadelphia Chapter FN 95) and the Stockton University Marine Field Station. Most recently, Mark Sulivan from Stockton University Marine Field Station flew an aerial drone survey to support the effort. RETTEW flew an aerial drone magnetometer survey, which indicated a large mass of metal in the marsh.
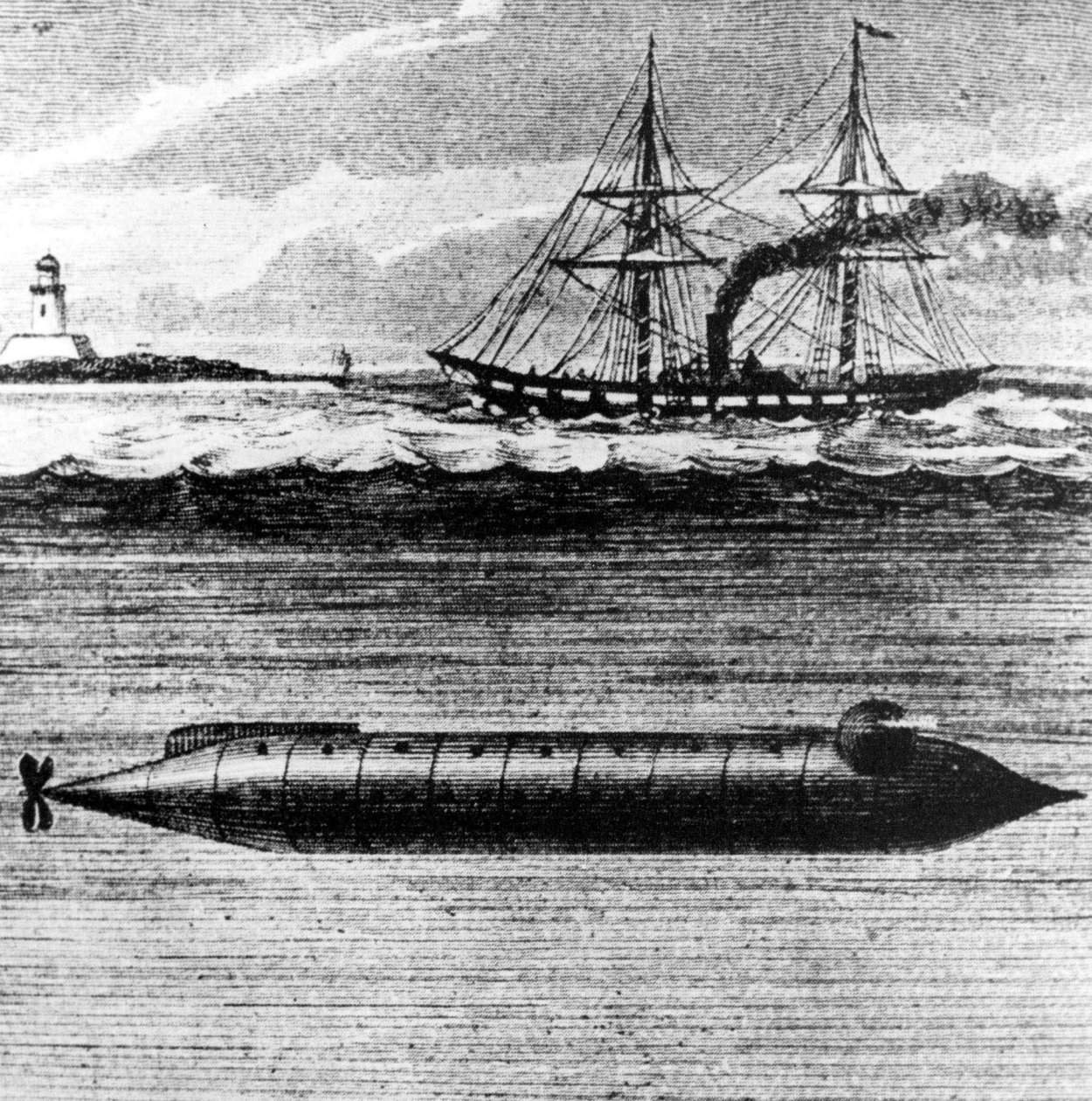
This effort builds on 20 years of effort, as I conducted my first search with Alice in 2005. Over the years, the search has been supported by Steve Nagiewicz (Philadelphia Chapter FN 95) and the Stockton University Marine Field Station. Most recently, Mark Sulivan from Stockton University Marine Field Station flew an aerial drone survey to support the effort. RETTEW flew an aerial drone magnetometer survey, which indicated a large mass of metal in the marsh.Why a submarine in a marsh? The brilliant designer Brutus de Villeroi had a falling out with investors and hid the sub in a marsh. For the complete history, read Chuck Veit’s book Natural Genius (Cover Below).

No joy on this search effort, but now we once again know where the sub isn’t. We hope to return soon with different equipment and an improved search location.
“If it was easy, it would have been found by now.” James Delgado
That’s all for now
Vince Capone FN 89 The New England Chapter of the Explorer’s Club.
PS All photographs are credited to Mathew Peoples from the Philadelphia Chapter.
Other credits
I want to thank the field crew in Riverside (Alice, Joe, Rick Isolda, Vince, Allen, and everyone else) for all their assistance and for supplying the food along with your hospitality. Ya’ll, and especially Joe, who went above and beyond building the crick crossing bridges and plywood on which to run the GPR. Thank you to Rick for his help with clearing and finding that knee-deep hole in the mud.
Huge thank you to Art/Grant and the UDel crew for coming north and for Art’s forgoing some precious sleep time assembling some very nice data charts. I learned a thing or two about presenting data from the good doctor.
A big shout of appreciation goes out to Captain Steve for his review of the historical information and historical photo overlays. His common-sense overview is always helpful.
I can’t leave out our resident photographer, Matt, who, in addition to great pictures, also lent us his brawn when required.


 © Copyright 2025 Vincent Capone
© Copyright 2025 Vincent Capone